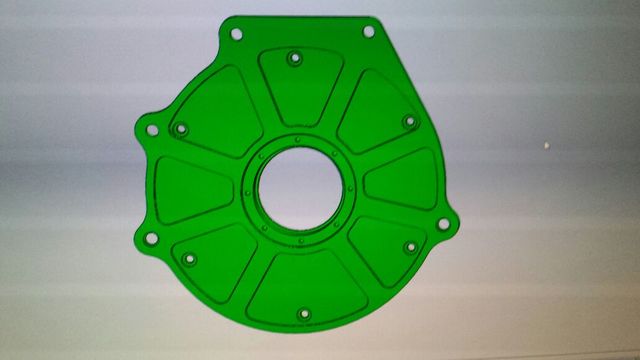

Ik heb iets meer geoefend met SolidWorks..
Motorruimte iets opgeruimd, overbodige kabels weggeknipt.. Bak verwijderd.
Van de eerdere plannen had ik nog een Raspberry Pi over met een Carberry extra.
Carberry maakt het mogelijk om Raspberry Pi op een vriendelijke manier met een auto te integreren, zo als 12V voeding, "Klem 15" sturing en zo voort..
Met name interessant voor CAN-BUS...
Alleen heb ik mijzelf daar in de vingers gesneden: het lijkt er op dat Carberry "abandoned" is.. er is bar weinig info over te vinden

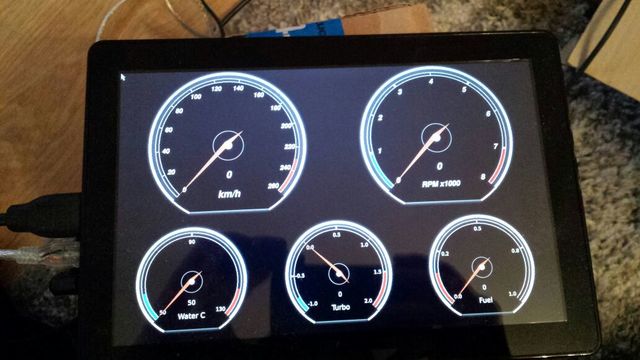
De motorcontroller werkt hoe dan ook met CAN.. dan is het kwestie van berichtjes programmeren en de nodige info zo als spanning, stroom, vermogen, temperatuur koelwater en dergelijke op het schermpje te zetten.
Verder gaat er gewoon een GTD tellerbak gebruikt worden

Ik ben maar een beginnende Linuxer en Piër.. als er iemand wat meer gevorderd is, zou ik graag een beetje hulp willen
EDIT:
Uiteraard heb ik de homokineten van de aandrijfassen afgehaald en terug in de naven gestopt en aangedraaid

wij gaan niet onszelf in de voet schieten
